Anycubic Kobra S1 Combo 3D Printer, 4 Stunning Multicolor with Anycubic ACE PRO, 600mm/s High Speed and 320℃ Hotend Free-Clog Extruder, Intelligent Drying While Printing, Built-in Camera 250*250*250mm
$599.99 (as of June 19, 2025 23:45 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)Engineers at Northwestern University have revolutionized robotics with their development of soft, flexible 3D-printed actuators inspired by human muscles, allowing robots to move through expansion and contraction. This breakthrough has led to the creation of a worm-like soft robot capable of maneuvering through tight spaces and an artificial bicep that can lift weights repetitively. The low-cost actuators, developed under the leadership of Prof. Samuel Truby with contributions from Taekyoung Kim and Ph.D. candidate Pranav Kaarthik, promise safer interactions between humans and robots, thanks to their soft design. Published in the Advanced Intelligent Systems journal, this innovation utilizes “handed shearing auxetics” (HSAs) from rubber and thermoplastic polyurethane for enhanced flexibility. With the potential to significantly impact fields like bionic body parts and muscle repair, these muscle-inspired actuators represent a significant leap forward in robotic mobility and task capability. Have you ever wondered how close we are to creating robots that can move just like humans? In recent strides, engineers at Northwestern University have developed something truly groundbreaking – flexible, 3D-printed actuators inspired by human muscles. Let’s dive into the fascinating world of soft robotics and unravel the details of this engineering marvel.

$30 off $400+ Anycubic Products with code AC30OFF
Research Overview
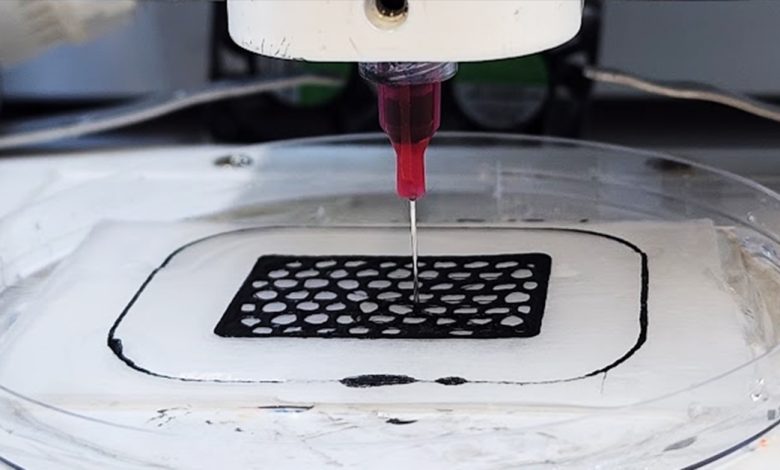
The development of soft, flexible actuators marks a significant leap forward in robotics. Unlike traditional rigid actuators, these newly designed components can expand and contract, mimicking the natural movement of human muscles. This innovation enables robots to not only move more organically but also to perform tasks with increased precision and dexterity. The brilliance of this technology lies in its ability to replicate the sophisticated mechanics of muscle movement, allowing for a wide range of applications from intricate surgical tools to resilient industrial robots.
The Development Team
Behind this incredible innovation is a dedicated team of engineers led by Professor Samuel Truby. Joining him are Taekyoung Kim, a postdoctoral scholar, and Pranav Kaarthik, a Ph.D. candidate. Their collective expertise and commitment to advancing robotics technology have brought this project to fruition. It’s a clear example of how collaboration and academic excellence can yield revolutionary results.
Publication Details
The findings of this research have been published in the prestigious journal Advanced Intelligent Systems. The study, titled “A flexible, architected soft robotic actuator for linear, servo-driven motion,” details the design, development, and potential applications of the actuators. Publications like this not only highlight the importance of the research but also ensure that the global scientific community can build upon these findings, accelerating technological advancement.
Applications: From Worms to Biceps
The practical applications of these actuators are both diverse and exciting. The engineering team has already leveraged this technology to create two distinct robotic models: a cylindrical worm-like robot and an artificial bicep.
The Worm-Like Robot
Imagine a robot that can navigate through tight spaces with ease. That’s exactly what the worm-like robot accomplishes. Thanks to its flexible actuators, it can compress and twist to maneuver through confined areas that would otherwise be inaccessible to more rigid robotic designs. This capability could prove invaluable in search and rescue missions, medical procedures, and even space exploration, where navigating through small openings is often a necessity.
The Artificial Bicep
Equally impressive is the artificial bicep, which showcases the actuator’s strength and versatility. This robotic arm can lift weights repetitively, demonstrating its potential for various industrial and medical applications. For instance, it might be used in rehabilitation to assist patients in regaining muscle function or in factories to handle repetitive tasks, reducing strain on human workers.

Buy Photon Mono M5 Get Free 1KG Resin
Cost Efficiency
One of the most striking advantages of these actuators is their cost efficiency. Each robot costs about $3 to produce, excluding the motor. This is a significant reduction in cost compared to traditional rigid actuators, which are often expensive and complex to manufacture. By using affordable materials and 3D printing technology, the team has made advanced robotics accessible to a broader range of applications and industries.
Technical Innovation
The innovative spirit of this research is evident in the use of handed shearing auxetics (HSAs) made from rubber. This material allows for unique movements that are not possible with conventional actuator designs. The genius of the HSAs lies in their ability to stretch and contract while maintaining their structural integrity, thereby mimicking the natural behavior of human muscles.
Enhancing Flexibility with New Materials
Taekyoung Kim played a crucial role in enhancing the flexibility of the actuators by incorporating thermoplastic polyurethane. This material, combined with a cost-effective 3D printing process, allowed the team to create actuators that are not only flexible and durable but also inexpensive to produce.
Overcoming Limitations
In the past, actuators often faced limitations such as rigidity and a lack of natural movement. Kim addressed these issues by integrating soft rubber bellows into the design. These bellows enable the actuators to perform complex movements using a single servo motor, streamlining the design and expanding the actuator’s range of motion.
Comparison of Actuator Features
| Feature | Traditional Rigid Actuators | Soft 3D-Printed Actuators |
|---|---|---|
| Flexibility | Low | High |
| Cost | High | Low |
| Movement Complexity | Limited | Advanced (mimics human muscles) |
| Safety | Potentially hazardous | Safer for human interaction |
| Manufacturing Process | Complex | Simplified via 3D printing |

Safety and Practicality
One of the key goals of developing these soft actuators is to enhance the safety of robots in human environments. Traditional robots, with their rigid structures, can pose a risk of injury to people. Soft robots, on the other hand, are designed to be more robust and forgiving. Their pliable nature means they are less likely to cause harm in the event of unexpected interactions with humans or delicate objects.
Future Impact
The potential impact of soft actuators on the future of robotics is immense. By improving robot mobility and expanding the types of tasks they can perform, these actuators open the door to a myriad of possibilities.
Advancements in Bionic Body Parts
One of the most exciting prospects is the development of advanced bionic body parts. Soft actuators could be used to create prosthetic limbs that move and behave like their biological counterparts, offering a higher quality of life for amputees.
Innovations in Muscle Repair
Furthermore, these actuators might play a role in muscle repair and rehabilitation. They could be used in wearable devices that support and strengthen muscles, aiding in faster recovery from injuries and surgeries.

Related Work
This research builds upon earlier work in the field of soft robotics. For instance, there have been projects focused on creating robotic hands with 3D-printed artificial muscles, capable of performing tasks with remarkable dexterity. Additionally, synthetic muscles have been developed that can lift significant weights, showcasing the strength potential of soft actuators.
Previous Instances of Similar Research
| Research Focus | Key Development | Impact |
|---|---|---|
| Robotic Hands with 3D-Printed Muscles | Precision and Dexterity | Enhanced human-robot interaction |
| Synthetic Muscles for Weight Lifting | Strength and Durability | Industrial and medical applications |
Contact and Updates
Staying informed about the latest advancements in 3D printing and robotics is easier than ever. If you’re interested in keeping up with developments like those from Northwestern University, consider subscribing to newsletters and following dedicated social media channels. By staying engaged, you’ll have a front-row seat to the future of technology.
In summary, the development of flexible, 3D-printed muscle-inspired actuators is a monumental step forward in the field of robotics. It illustrates the potential for more organic, cost-effective, and safe robotic designs, paving the way for future innovations in various industries. Whether it’s navigating through tight spaces, lifting weights repetitively, or even advancing bionic body parts, the applications are vast and varied. The work of Professor Truby and his team at Northwestern University epitomizes the boundless possibilities that lie ahead in this exciting field.
$30 off $400+ Anycubic Products with code AC30OFF

SUNLU PLA 3D Printer Filament PLA Filament 1.75mm, Neatly Wound 3D Printing Filament 1.75mm, Dimensional Accuracy +/- 0.02 mm, Fit Most FDM 3D Printers, 1kg Spool (2.2lbs), Black
$14.29 (as of June 19, 2025 23:45 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
ANYCUBIC PLA 3D Printer Filament, 3D Printing PLA Filament 1.75mm Dimensional Accuracy +/- 0.02mm, 1KG Spool (2.2 lbs), Texture Grey
$13.99 (as of June 19, 2025 23:45 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
ELEGOO Mars 5 Ultra 9K Resin 3D Printer, 150mm/h High Speed Printing, Smart Automatic Leveling, Intelligent Detection, WiFi-Transfer, Printing Size of 6.04 x 3.06 x 6.49 inch
$284.99 (as of June 19, 2025 23:45 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Fully Assembled Mini 3D Printer for Kids and Beginners - Complete Starter Kit with Auto Leveling 3D Printing Machine, 10M PLA Filament, and SD Card - WiFi 3D Home Printer for MAC, Windows, and Linux
$224.99 (as of June 19, 2025 23:45 GMT +00:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)